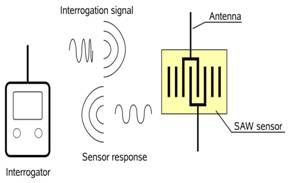
Fig 1: principle of passive, wireless sensors: a RADAR (interrogator) emits electromagnetic waves towards a cooperative target whose RADAR cross section or returned pulse characteristics are representative of its environment, hence acting as a sensor. The physics of the cooperative target interaction with the electromagnetic wave -- through the piezoelectric substrate converting the incoming wave to an acoustic wave -- is linear, removing the threshold limitation of silicon based RFID devices.
Single port acoustic resonators are well suited for applications aimed at monitoring the evolution of physical quantities through a wireless link. In such an application, the sensing element, based on a single crystal piezoelectric substrate patterned with electrodes, is not powered by a local battery but remotely by loading energy though a RADAR-like interrogation sequence (Fig 1). An incoming electromagnetic pulse centered on a given frequency loads energy in the resonator cavity if synchronism conditions are met -- namely if the incoming pulse exhibits a spectrum overlapping the sensor resonance frequency. Unlike silicon based Radio Frequency IDentification (RFID) tags which require significant incoming power to reach the threshold voltage of a rectifying diode, all piezoelectric processes are linear and thus the interrogation range is only limited by the receiver noise. The hardware, operating following strategies of frequency-swept pulse-mode monostatic RADAR, is mostly controlled by digital electronics for maximum flexibility and ability to implement adaptative frequency generation techniques dependent on the signal returned by the sensor.
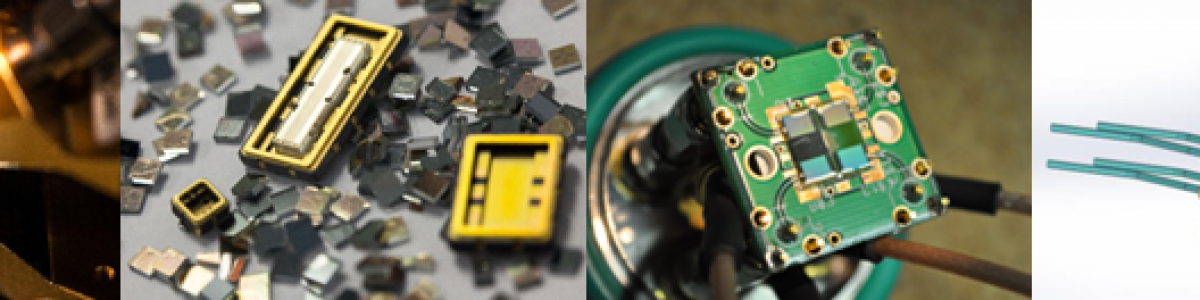
The most classical approach to wireless sensing through resonator frequency characterization is to use a Surface Acoustic Wave (SAW) sensor: the acoustic velocity is dependent on the physical property being investigated (stress, temperature) and selecting an appropriate substrate cut, a given frequency matches a given physical property value. In all cases, a differential measurement approach is used in which two acoustic resonators (Fig 2) exhibit different dependence with the physical quantity, thus removing correlated noise effects (capacitive frequency pulling in the communication channel, local oscillator drift and aging on the interrogation unit) [2, 3, 4]. Antenna design is a significant issue with the requirement of complying with harsh environmental and industrial environments, reaching interrogation ranges matching user needs (typically 2-3 m with monopole antennas, up to 10 m when using a directive Yagi-Uda antenna on the reader side while keeping the simple and robust dipole antenna on the sensor side).
Fig 2: single port acoustic resonator, apodized interdigitated transducers.
Beyond the classical SAW approach, novel architectures include the use of the piezoelectric transducer as a converter from a low frequency impedance (resistance, capacitance) change to a radiofrequency signal, again through linear processes. Such impedance measurements have been demonstrated on switches and capacitances acting as moisture detector.
Finally, the SAW concept, limited by lithography resolution to the GHz range, is being replaced by a stack of materials confining a bulk acoustic wave under the so called High-overtone Bulk Acoustic Resonator (HBAR) concept. Current investigations include a comparison of the resolution when operating in the frequency domain (resonance frequency identification as a function of environmental conditions) or in the time domain (delay between successive pulses, again as a function of acoustic velocity affected by the external parameters such as impedance change or physical property).

Fig3: high temperature measurements: the passive sensor lacks a local energy source, extending the operating range beyond those accessible with battery powered or silicon based sensors. Using piezoelectric substrates resistant to high temperatures, measurements well above 350 degrees C are possible.
Targeted applications include industrial equipment monitoring of rotating pieces, and high temperature measurements (up to 850 degC, as demonstrated as part of the SAWHOT project (Fig 3). In order for the sensor to withstand such high temperatures, novel interdigitated transducer patterning techniques on langasite were explored, and innovative packaging strategies and antenna design compatible with the harsh environment have been developed. Wireless sensing is most suitable in this environment since electrical connections are challenging: here, the sensor is probed by the RADAR-like interrogation unit through the furnace insulating wall. As part of this activity, the use of commercially available radiomodems was considered as an alternative to dedicated hardware, especially aimed at complying with higher temperature ranges (up to 125 degC) to which the interrogation unit might be subject, in addition to lower power consumption. In this context, the same radiomodem is used for recording acoustic sensor response, identifying the resonance frequencies, and transmitting data though a digital wireless link following a Wireless Sensor Network (WSN) strategy. In this context, since a same component used initially as a radiomodem is also used for probing the SAW response, the executive environment TinyOS has been ported to the STM32 platform the reader is based on, as available at the sourceforge archive of tinyos on stm32 [5] (Fig. 4).
 Fig 4: long term automated measurement of two sensors located indoor and outdoor, both passive sensors being probed by an active dedicated RADAR system transmitting measurements through a Bluetooth wireless link to the web server. The weather underground archive is provided as reference.
Fig 4: long term automated measurement of two sensors located indoor and outdoor, both passive sensors being probed by an active dedicated RADAR system transmitting measurements through a Bluetooth wireless link to the web server. The weather underground archive is provided as reference.
Wireless passive sensors are best suited for applications in which a local energy source cannot be replaced: among such applications, sensors buried in concrete or in soil have demonstrated outstanding stability over time, robust packaging protecting the sensing element from the environment, and virtually infinite life expectancy. However, no measurement storage is possible in this passive sensor configuration: the measurement is only collected as long as the external reader circuit is active. Acoustic passive sensors have been demonstrated to be compatible with commercial off-the-shelf Ground Penetrating RADAR (GPR) units, acting as cooperative targets (Fig 5). Time-domain multiplexing allows for unambiguous identification of the sensor response within the dielectric and conductivity interface clutter: no hardware modification of the GPR unit is needed since all sensor response identification is performed on the collected data as digital signal post-processing [6, 7]. However, because the spectrum of the pulse emitted by the GPR is dependent on the permittivity of the near subsurface, a device exhibit a broader response spectrum than a delay line is desirable. We have hence demonstrated the interrogation of HBAR as a delay line acting as a passive, cooperative target to a GPR [8] and identified the cause of the limited range with respect to the classical delay line. Design rules aimed at improving this range have been given and are now under investigation for a practical demonstration [9].
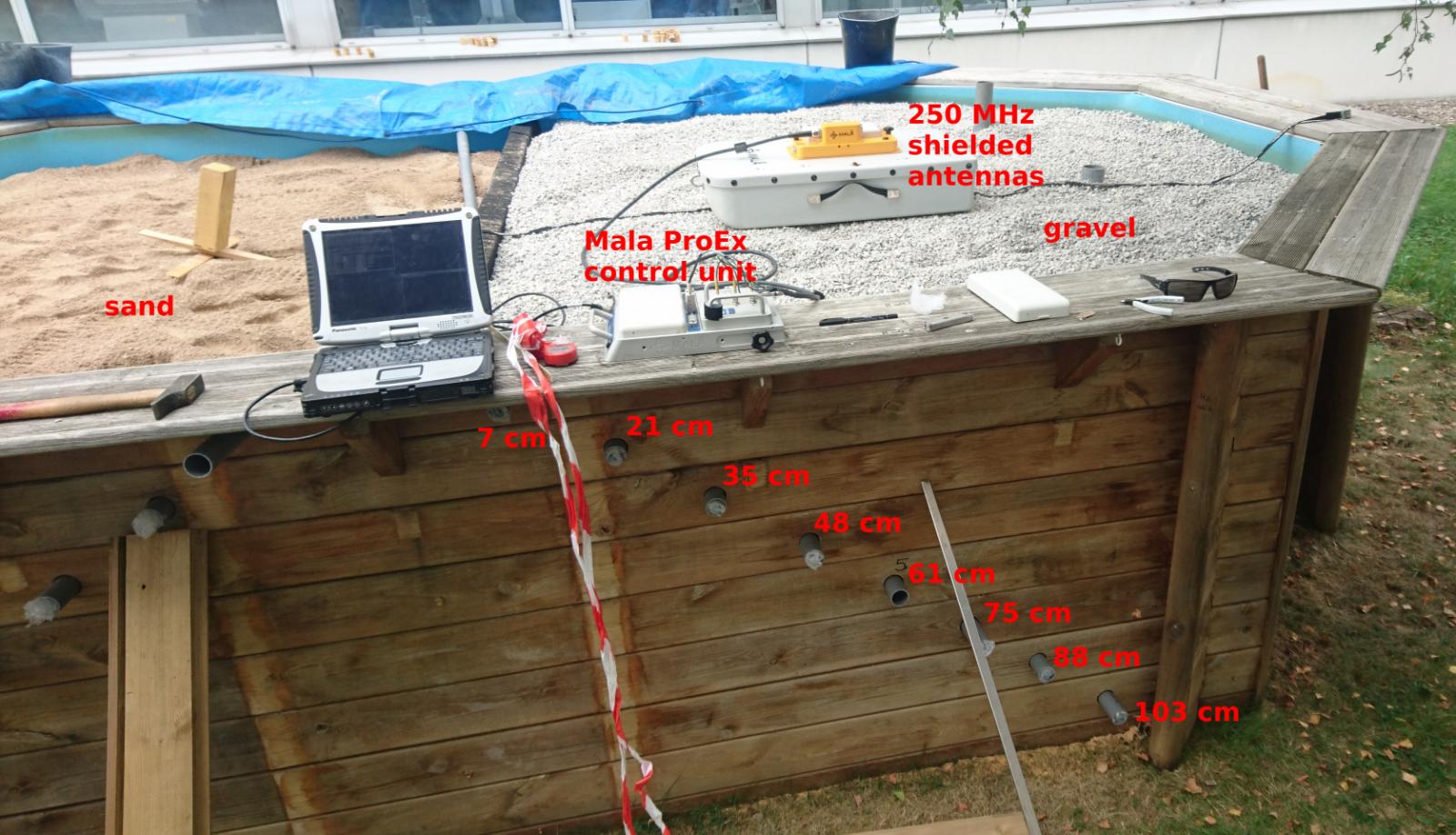
Fig 5: test setup for GPR probing of cooperative targets in realistic environments.
In order to exploit at best the culture of the Time & Frequency department of FEMTO-ST, and bringing an original angle to the now well known field of wireless sensor interrogation, further investigations include assessing the ultimate resolution of resonators with respect to a delay line acoustic sensor approach, especially since the time constants are very different, with typical interrogation durations of resonators in the hundreds of microseconds while delay line could be interrogated in less than 5 microseconds. Such considerations include analyzing the local oscillator fluctuation (phase noise) during the interrogation duration, trade-off with the wide measurement bandwidth needed for collecting the delay line signal and the complex data acquisition circuit [9]. As part of such developments, we have developed a wideband interrogation unit demonstrating a measurement refresh rate only limited by the delay line longest echo delay, in our case 4 µs [10].
Lately, investigations have focused on the use of Ground Penetrating RADAR for probing sub-surface sensors, allowing to identify issues with the timebase stability. Following initial investigations with the support of the TOTAL oil company, an ANR grant UNDERGROUND was awarded, starting in February 2018 and running for 4 years.
The project aims at meeting environmental challenges related to land restoration following its use by
oil industry infrastructures by providing the means for long term monitoring of organic pollutants
in the subsurface. Our answer to adress this problem is to develop a measurement system in which
passive (no local energy source next to the sensing element) wireless sensors are deployed and probed
from the surface. The sensors, a cooperative target whose signature is acquired from the surface using
a classical geophysical tool – a Ground Penetrating RADAR (GPR) –, is designed around the conversion
of the incoming electromagnetic field to an acoustic wave.
Such a Surface Acoustic Wave (SAW) transducer, fabricated by patterning electrodes on a piezoelectric
substrate, provides the chemical sensitivity by exhibiting a dependence of the acoustic velocity with
mass loading. This acoustic velocity is measured as a variation of the echo delay – with a differential
measurement between chemically functionalized and non-functionalized acoustic paths for getting rid
of the RADAR to sensor distance and acoustic velocity temperature dependence.
The selectivity is provided by the dedicated thin film (i. e. chemical functionalization) designed
for sensing a given set of compounds, inspired from well known bulk chemical reaction schemes
transferred to cleanroom compatible (photo)resists. While GPR instruments are commercially available
and their ability to acquire the echoes delayed by the cooperative target has already been demonstrated,
their suitability to recovering the quantity under investigation, here analyte concentration, remains
to be addressed.
While a custom GPR meeting those requirements, matching the sensor transfer function and high
stability timebase, is developed during the project, assessing the suitability of a commercial
unit will provide the baseline with which our system will be compared. Most significantly, the
stroboscopic timebase stability appears as an issue for the fine phase measurement we are
interested in, and drift mitigation strategies are investigated.
Finally, deployment of the sensor in a relevant environment requires a strong packaging yet
allowing the sensing area to be in contact with the fluid containing the compound under investigation,
in addition to an antenna designed to radiate efficiently towards the surface while being compatible
with insertion in the soil by using coring tools. Meeting all these challenges will allow for the
deployment of the sensors on relevant sites, following their calibration and assessment of the sub-ppm
detection limit in controlled environments.
[1] G. Martin, P. Berthelot, W. Daniau, V. Blondeau-Patissier, B. Guichardaz, S. Ballandras, A. Lambert, Measuring the Inner Body Temperature using a Wireless Temperature SAW-sensor-based System, Proc. IEEE Ultrasonics Symposium (Rotterdam, NL), 2005
[2] J.-M Friedt, C. Droit, G. Martin, and S. Ballandras, A wireless interrogation system exploiting narrowband acoustic resonator for remote physical quantity measurement, Rev. Sci. Instrum. 81, 014701 (2010)
[3] C. Droit, G. Martin, S. Ballandras, J.-M Friedt, A frequency modulated wireless interrogation system exploiting narrowband acoustic resonator for remote physical quantity measurement, Rev. Sci Instrum. 81 (5), 056103 (2010)
[4] J.-M Friedt, C. Droit, S. Ballandras, S. Alzuaga, G. Martin, P. Sandoz, Remote vibration measurement: a wireless passive surface acoustic wave resonator fast probing strategy Rev. Sci. Instrum. 83, p.055001 (2012)
[5] C. Droit, J.-M. Friedt, G. Goavec-Merou, G. Martin, S. Ballandras, K. Breschi, J. Bernard, H. Guyennet, Radiofrequency Transceiver for Probing SAW Sensors and Communicating Through a Wireless Sensor Network, Proceeding of Sensorcomm 2012 (Roma, Italy, Aug. 2012)
[6] T. Rétornaz, J.-M Friedt, S. Alzuaga, T. Baron, E. Lebrasseur, G. Martin, T. Laroche, S. Ballandras, M. Griselin, J.-P. Simonnet, Piezoelectric radiofrequency transducers as passive buried sensors, Nondestructive Testing and Evaluation -- Special Issue on Civil Eng. Applications of GPR (online May 21 2012)
[7] J.-M Friedt, T. Rétornaz, S. Alzuaga, T. Baron, G. Martin, T. Laroche, S. Ballandras, M. Griselin, J.-P. Simonnet, Surface Acoustic Wave Devices as Passive Buried Sensors, Journal of Applied Physics 109, issue 3, p. 034905 (02/2011)
[8] J.-M Friedt, A. Saintenoy, S. Chrétien, T. Baron, E. Lebrasseur, T. Laroche, S. Ballandras, M. Griselin, High-overtone Bulk Acoustic Resonator as passive Ground Penetrating RADAR cooperative targets,J. Appl. Phys., vol 113, num. 13, pp. 134904 (2013)
J.-M Friedt, A. Saintenoy, T. Baron, E. Lebrasseur, T. Laroche, S. Ballandras, M. Griselin,
High-overtone Bulk Acoustic Resonator as passive sensor acting as buried cooperative target interrogated by Ground Penetrating RADAR, Proceedings of the 2013 IFCS (Prague, Czech Rep.)
[9] N. Chrétien, J.-M Friedt, S. Ballandras, B. Francois, G. Martin, P. Varshney, On the need for low phase noise oscillators for wireless passive sensor probing, Sensorcomm 2012 (Rome, Italy, Aug. 2012)
[10] G. Goavec-Mérou, N. Chrétien, J.-M Friedt, P. Sandoz, G. Martin, M. Lenczner, S.Ballandras, Fast contactless vibrating structure characterization using real time FPGA-based digital signal processing: demonstrations with a passive wireless acoustic delay line probe and vision, Rev. Sci. Instrum 85 (1), Jan. 2014, pp.015109