Objectives
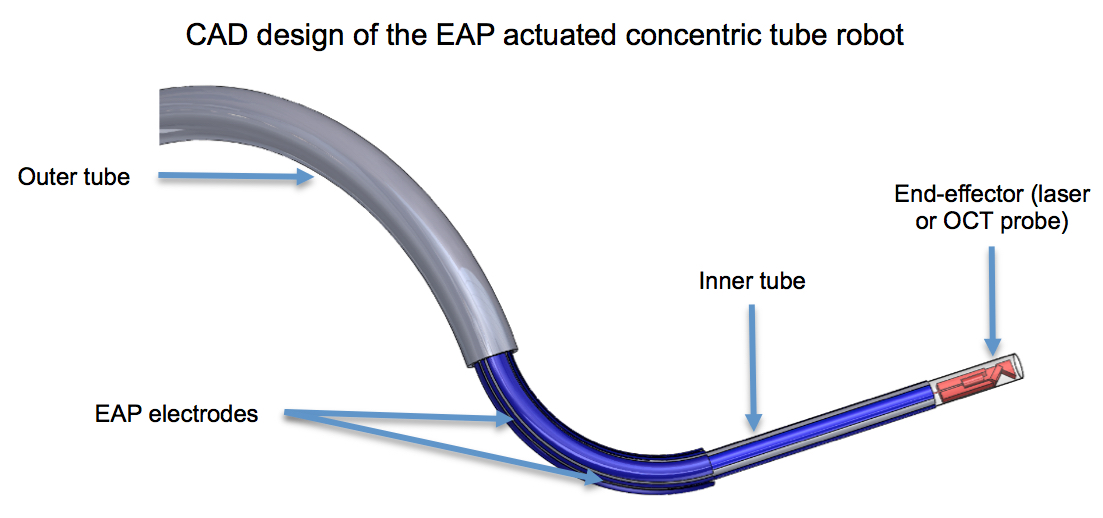
The large development of computer-assisted surgery has encouraged the miniaturization of intracorporeal robots. For that, continuum and cannula robots are studied worldwide and their design, modeling, fabrication, and control constitute hot topics. Our team proposes the study of the embedded actuator based concentric tube robots in order to improve the performances of this interesting robot kinematics. We are focusing on Electro-Active Polymer (EAP) for the actuation of cannula robots and their combination with efficient available actuators (SMA, tendon-driven, etc.).
Design & Modeling
The objective is to develop innovative designs and the use of smart actuators combined with cutting edge mechanisms in order to overcome the limitations of actual designs. The approach to model the continuum structure is also figured out by keeping in head the final objectives: the optimization of the proposed design and the model-based control. Basically, the trade-off has to be made between the accuracy then the complexity of the model, which enables to well describe the robot behavior, and the computation time. The final choice depends on the task requirements.
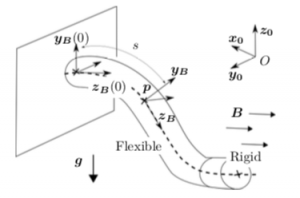
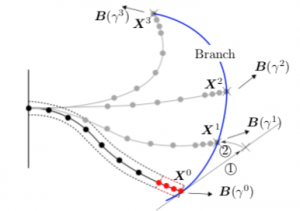
Different hypothesis are developed: piecewise constant curvature (PCC), Euler–Bernoulli beam theory, Kirchhoff beam theory, Cosserat rod, etc. Continuation method and bifurcations analysis are used in order to understand the complex behavior of soft continuum robots (stability, multiple solutions to forward kinematics, non-linearities, etc.). The proposed computational analysis was applied to concentric tube robots and magnetic continuum robots. It is done in collaboration with ICube - AVR Strasbourg.
Fabrication & Control
The challenge is to fabricate the proposed design with the considered scale by using conventional machining, 3D printing, and micromachining. It is quite cumbersome to miniaturize mechanisms/actuators then the technological development is one core of this task. Afterward, the control of the continuum robots is achieved by using the models previously established and appropriate sensors (magnetic tracker, camera, etc.). The challenge is to get accurate, fast, and repeatable behavior of the robot.
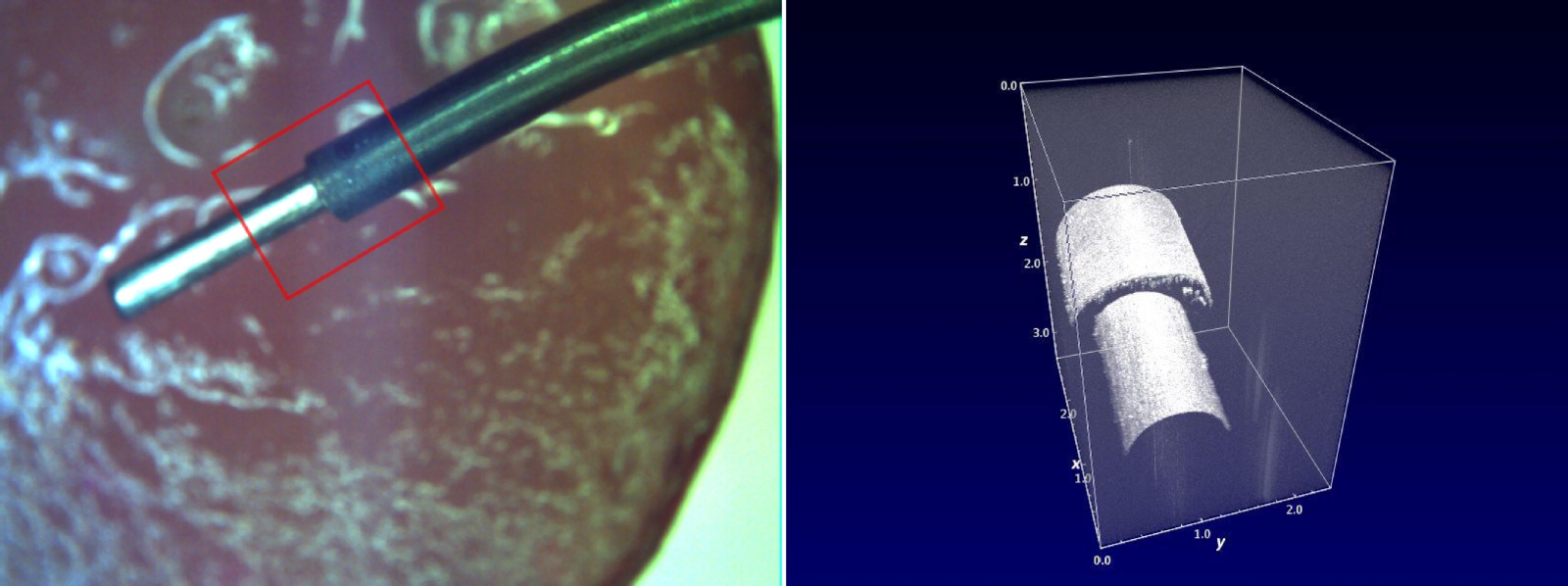
We are investigating the sensor-based control of soft continuum robots. Various sensors (camera, electromagnetic tracker, OCT, US, MRI, etc.) could be used according to the application constraints. For example, we have recently demonstrated the achievement of 10 µm positioning accuracy (in 2D) of CTR by using OCT feedback.
Contact:
Kanty Rabenorosoa (contact info)
Involved people:
Dang Viet Anh Nguyen (PhD student), Quentin Peyron (PhD students), Cédric Girerd (former PhD), M. Taha Chikhaoui (former PhD), Patrick Rougeot, and Nicolas Andreff.
Collaborators:
Pierre Renaud (ICube), Jérôme Szewczyk (ISIR), Jessica Burgner-Kahrs (CRL - University of Toronto), Quentin Boehler and Bradley Nelson (MSRL - ETHZ)
Selection of publications:
Q. Peyron, K. Rabenorosoa, N. Andreff, and P. Renaud, A numerical framework for the stability and cardinality analysis of concentric tube robots: Introduction and application to the follow-the-leader deployment, Mechanism and Machine Theory, vol. 132, Feb. 2019, pp: 176-192, DOI: https://doi.org/10.1016/j.mechmachtheory.2018.10.020.
M. T. Chikhaoui, A. Benouhiba, P. Rougeot, K. Rabenorosoa, M. Ouisse, and N. Andreff, Developments and Control of Biocompatible Conducting Polymer for Intracorporeal Continuum Robots, Annals of Biomedical Engineering, first online, 2018, DOI: https://doi.org/10.1007/s10439-018-2038-2.
Q. Peyron, Q. Boehler, K. Rabenorosoa, B. Neslon, P. Renaud, and N. Andreff, Kinematic analysis of magnetic continuum robots using continuation method and bifurcation analysis, IEEE Robotics and Automation Letters (accepted + IEEE/RSJ IROS Presentation, Madrid, Spain), in Press, 2018, DOI: 10.1109/LRA.2018.2855803.
C. Girerd, T. Lihoreau, K. Rabenorosoa, B. Tamadazte , M. Benassarou, L. Tavernier, L. Pazart, E. Haffen, P. Renaud, and N. Andreff, In Vivo Inspection of the Olfactory Epithelium: Feasibility of Robotized Optical Biopsy, Annals of Biomedical Engineering, first online, DOI: 10.1007/s10439-018-2076-9.
M. T. Chikhaoui, K. Rabenorosoa, and N. Andreff, Kinematics and performance analysis of a novel concentric tube robotic structure with embedded soft micro-actuation: towards contactless medical applications, Mechanism and Machine Theory, 104, Octo. 2016, p. 234-254, DOI: 10.1016/j.mechmachtheory.2016.06.005.