Scientific Coordinator: Redwan Dahmouche – redwan.dahmouche@femto-st.fr
Michael Gauthier – michael.gauthier@femto-st.fr
PhD students: Ivan Tchouatat, Pardeep Kumar
Former students: Jean-Antoine Seon, Joël Bafumba Liseli, Benoit Brazey
The ability of performing rotations is essential in the assembly process of micro and nanosystems. In fact, performing rotation operations represent today the technical barrier in performing micro- nanoassembly and represent a considerable scientific challenge in micro and nanorobotics. The current solution to perform rotations at micro- and nanoscale is to use rotary positioning stages. However this solution has several drawbacks:
- the alignment of the rotation axis of the stage with the gripper’s end-effector is extremely difficult to obtain,
- this solution induces the rotation of all the bulky components carried by the rotary stage which requires a large work volume, reduces the accuracy and lowers the throughput
- the motion of the stage may generate vibrations which affects the gripper’s end-effector during the micro and nanomanipulation.
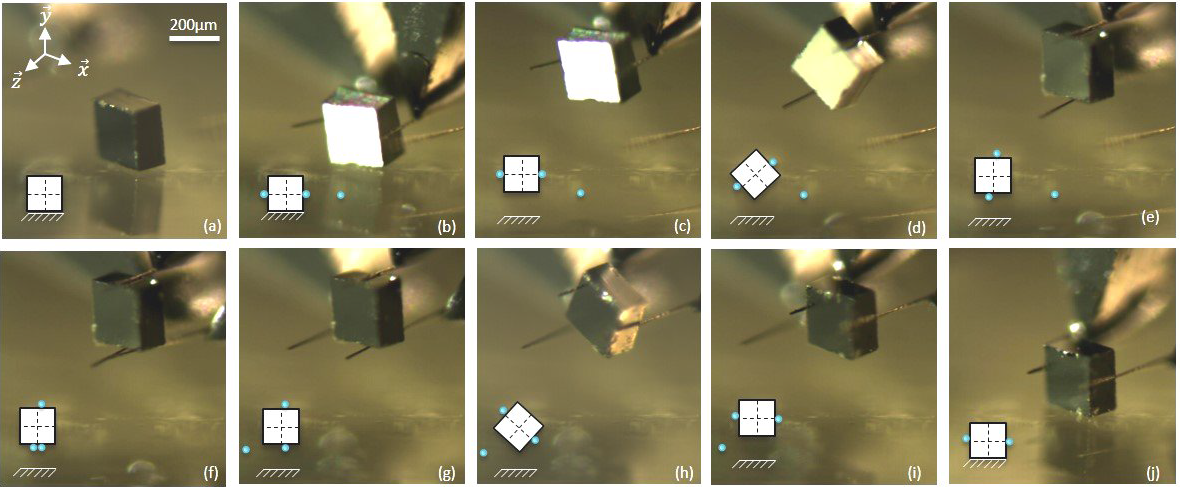
Instead of performing global rotation of the whole system, local rotation of the manipulated components can be performed. The approach we propose is thus to design dexterous micro and nanomanipulators with a high number of degrees of freedom (DOF) associated with efficient micro-nanomanipulation strategies.
Selected publications
J.-A. Seon, R. Dahmouche, and M. Gauthier, “Enhance In-Hand Dexterous Micromanipulation by Exploiting Adhesion Forces,”IEEE Trans. Robot., vol. 34, no. 1, pp. 113–125, Feb. 2018.
J. Bafumba Liseli, R. Dahmouche, P. Kumar, J. A. Seon, and M. Gauthier, “Enhancing in-hand dexterous micro-manipulation for real-time applications,” inIEEE International Conference on Automation Science and Engineering, 2018, vol. 2018-Augus, pp. 1605–1611.
J.-A. Seon, R. Dahmouche, and M. Gauthier, “On the contribution of adhesion and friction in planning dexterous in-hand micromanipulation,”J. Micro-Bio Robot., vol. 12, no. 1–4, 2017.
J.-A. Seon, R. Dahmouche, B. Brazey, and M. Gauthier, “Trajectory Planning for Dexterous in-Hand Micromanipulation in Presence of Adhesion Forces,” inInternational Conference on Intelligent Robots and Systems, 2016.
B. Brazey, R. Dahmouche, J. A. Seon, and M. Gauthier, “Experimental validation of in-hand multi-fingered planar orientation and translation in µ-scale,”Intell. Serv. Robot., vol. 9, no. 2, pp. 101–112, 2016.